




เวกเตอร์อินเวอร์เตอร์ความถี่ (AC ไดรฟ์)

ข้อกำหนดมาตรฐาน
รายการ |
ข้อมูลจำเพาะ |
||
Power |
แรงดันไฟฟ้าและความถี่ระดับ |
220/380/480/690/1140 โวลต์ |
|
ที่อนุญาต fluctuation |
แรงดันไฟฟ้า: ± 10% ความถี่: ± 5% |
||
ควบคุมระบบ |
ระบบควบคุม |
ประสิทธิภาพสูงควบคุมเวกเตอร์อินเวอร์เตอร์ DSP |
|
วิธีการควบคุม |
V/F ควบคุม, เวกเตอร์ควบคุม W/O PG, เวกเตอร์ควบคุม W/mx328/mp287/mp497/mp366/mx416/mx426/mp245/mp486/mx338/mp496 |
||
อัตโนมัติแรงบิดฟังก์ชั่น boost |
ตระหนักถึงต่ำความถี่ (1 เฮิร์ต) และเอาท์พุทขนาดใหญ่ควบคุมแรงบิดภายใต้ V/F โหมดควบคุม |
||
การเร่ง/ลดความเร็วควบคุม |
ตรงหรือ S - curve โหมด สี่ครั้งและ time ช่วง 0.0 ถึง 6500.0 วินาที. |
||
V/F curve โหมด |
Linear, square root/m - th power, custom V/F curve |
||
โหลดความสามารถ |
G ประเภท: กระแสไฟในปัจจุบัน 150% - 1 นาที, กระแสไฟ 180% - 2 วินาที F ประเภท: กระแสไฟในปัจจุบัน 120% - 1 นาที, กระแสไฟ 150% - 2 วินาที |
||
ความถี่สูงสุด |
เวกเตอร์ควบคุม: 0 ถึง 300 เฮิร์ต V/F ควบคุม: 0 ถึง 3200 เฮิร์ต |
||
Carrier ความถี่ |
0.5 16 กิโลเฮิร์ตซ์โดยอัตโนมัติปรับ carrier ความถี่ตามโหลดลักษณะ |
||
ความถี่อินพุตความละเอียด |
ดิจิตอลการตั้งค่า: 0.01 เฮิร์ต Analog การตั้งค่า: สูงสุด frequency×0. 1% |
||
เริ่มต้นแรงบิด |
G ประเภท: 0.5 เฮิร์ต/150% (vector control W/O PG) F ประเภท: 0.5 เฮิร์ต/100% (vector control W/O PG) |
||
Speed range |
1:100 (vector control W/O PG) 1:1000 (vector control W/mx328/mp287/mp497/mp366/mx416/mx426/mp245/mp486/mx338/mp496) |
||
Steady ความเร็วสูง precision
|
เวกเตอร์ควบคุม W/O PG: ≤ ± 0.5% (ความเร็ว synchronous) เวกเตอร์ควบคุม W/mx328/mp287/mp497/mp366/mx416/mx426/mp245/mp486/mx338/mp496: ≤ ± 0.02% (ความเร็ว synchronous) |
||
แรงบิดการตอบสนองต่อ |
≤ 40 มิลลิเซคอน (vector control W/O PG) |
||
แรงบิด boost |
อัตโนมัติแรงบิด boost; แรงบิดด้วยตนเอง boost (0.1% ถึง 30.0%) |
||
DC braking |
DC braking ความถี่: 0.0 เฮิร์ตสูงสุดความถี่, เบรคเวลา: 0.0 ถึง 100.0 วินาที, เบรค current มูลค่า: 0.0% ถึง 100.0% |
||
วิ่งควบคุม |
Jog ความถี่ช่วง: 0.00 เฮิร์ตสูงสุดความถี่; Jog Ac/deceleration เวลา: 0.0 วินาทีถึง 6500.0 วินาที |
||
Multi - speed |
สูงสุด 16 - speed ผ่าน control terminal |
||
ในตัว PID |
Easy to realize ปิด - loop ระบบควบคุมสำหรับการควบคุมกระบวนการ. |
||
แรงดันไฟฟ้าอัตโนมัติ (AVR) |
โดยอัตโนมัติรักษาเอาต์พุตคงที่แรงดันไฟฟ้าเมื่อแรงดันไฟฟ้าไฟฟ้าตารางการเปลี่ยนแปลง |
||
แรงบิดจำกัดและควบคุม |
"Excavator" - แรงบิดโดยอัตโนมัติจำกัดในระหว่างการใช้งานป้องกันบ่อย overcurrent trip; ปิด - loop เวกเตอร์โหมดใช้สำหรับควบคุมแรงบิด |
||
การกำหนดค่าส่วนบุคคลฟังก์ชั่น |
Self - ตรวจสอบอุปกรณ์ต่อพ่วงหลังจาก power - on
|
หลังจากเปิดเครื่อง, อุปกรณ์ต่อพ่วงจะดำเนินการการทดสอบความปลอดภัยเช่น ground, short circuit, ฯลฯ. |
|
ทั่วไป DC bus ฟังก์ชั่น |
หลายอินเวอร์เตอร์สามารถใช้ทั่วไป DC bus. |
||
Quick current จำกัด |
จำกัดในปัจจุบันอัลกอริทึมใช้ลดอินเวอร์เตอร์ overcurrent probability, และปรับปรุงทั้งหน่วยป้องกันการแทรกแซงความสามารถ |
||
การควบคุมเวลา |
การควบคุมเวลาฟังก์ชั่น: การตั้งค่าช่วง |
||
วิ่ง |
อินพุตสัญญาณ |
วิ่งวิธี |
แป้นพิมพ์/terminal/การสื่อสาร |
การตั้งค่าความถี่ |
10 ความถี่การตั้งค่ารวมถึง DC (0 ถึง 10 โวลต์), DC (0 ถึง 20mA), แผง potentiometer ฯลฯ |
||
เริ่มต้นสัญญาณ |
หมุนไปข้างหน้า/ย้อนกลับ |
||
Multi - speed |
มากที่สุด 16 ความเร็วสูงสามารถชุด |
||
หยุดฉุกเฉิน |
Interrupt controller เอาต์พุต |
||
Wobbulate run |
การควบคุมกระบวนการ run |
||
ความผิดพลาดรีเซ็ต |
เมื่อป้องกันฟังก์ชั่น active, โดยอัตโนมัติหรือด้วยตนเองรีเซ็ต fault สภาพ |
||
PID ข้อเสนอแนะสัญญาณ |
รวม DC (0 ถึง 10 โวลต์), DC (0 ถึง 20mA) |
||
OutpU Tสัญญาณ |
วิ่งสถานะ |
มอเตอร์แสดงสถานะ, หยุด, ac/ลดความเร็ว, ความเร็วคงที่, โปรแกรมวิ่งสถานะ |
|
ความผิดพลาดเอาต์พุต |
Contact ความจุ: ปกติปิด 5A/AC 250 โวลต์,ปกติเปิด 3A/AC 250 โวลต์,1A/DC 30 โวลต์. |
||
Analog output |
2 - way analog output, 16 สัญญาณสามารถเลือกได้เช่นความถี่, current, แรงดันไฟฟ้าอื่นๆ, เอาต์พุตสัญญาณช่วง (0 ถึง 10 โวลต์/0 ถึง 20mA). |
||
เอาต์พุตสัญญาณ |
ที่ 3 - way เอาต์พุต, มี 40 สัญญาณแต่ละ way |
||
Run ฟังก์ชั่น |
จำกัดความถี่กระโดดความถี่ความถี่ชดเชย, auto - tuning, การควบคุม PID |
||
DC current เบรก |
ในตัว PID ควบคุมเบรก current เพื่อให้แน่ใจว่าเพียงพอเบรคแรงบิดภายใต้ overcurrent สภาพ |
||
วิ่ง command ช่อง |
สามช่อง: การทำงานแผงควบคุมเทอร์มินัลและ serial พอร์ตการสื่อสาร. พวกเขาสามารถเปลี่ยนผ่านหลายวิธี |
||
ความถี่แหล่งกำเนิดแสง |
รวม 5 ความถี่แหล่งที่มา: digital, analog แรงดันไฟฟ้า analog current, multi - speed และ serial port. พวกเขาสามารถเปลี่ยนผ่านหลายวิธี |
||
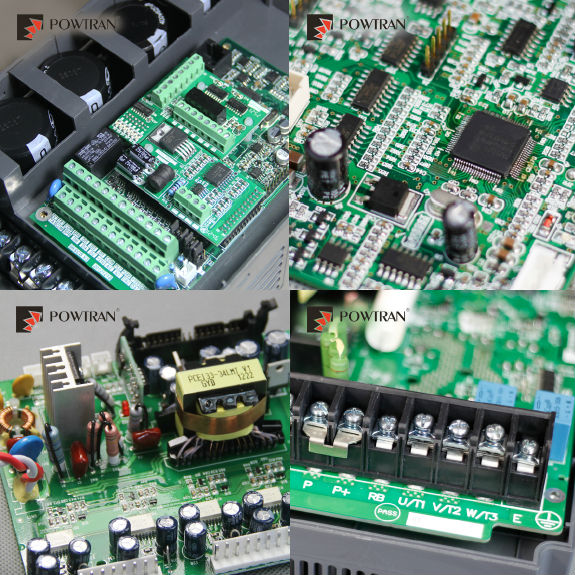
อินพุตเทอร์มินัล |
6 อินพุตเทอร์มินัล, ใช้งานร่วมกับ active PNP หรือ NPN อินพุตโหมด, one of them สามารถความเร็วสูง pulse input (0 to 100 กิโลเฮิร์ตซ์ square wave); 2 analog input terminals สำหรับแรงดันไฟฟ้าหรือ current input. |
||
เอาต์พุต |
2 ดิจิตอลเอาต์พุต, one of them สามารถความเร็วสูง pulse output (0 to 100 กิโลเฮิร์ตซ์ square wave); หนึ่งรีเลย์ output; 2 analog เอาต์พุตตามลำดับสำหรับอุปกรณ์เสริมช่วง (0 ถึง 20mA หรือ 0 ถึง 10 โวลต์), พวกเขาสามารถใช้ชุดความถี่ความถี่ความเร็วอื่นๆพารามิเตอร์ทางกายภาพ. |
||
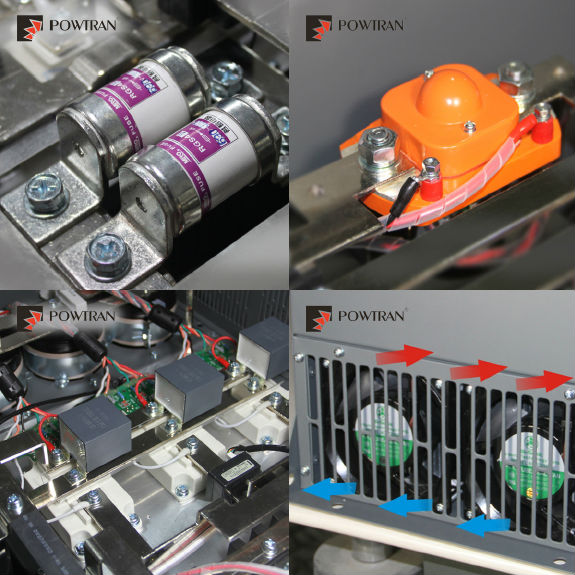
ฟังก์ชั่นป้องกัน |
อินเวอร์เตอร์ป้องกัน |
การป้องกัน overvoltage, undervoltage, ป้องกันกระแสเกิน, ป้องกันการโอเวอร์โหลด, การป้องกันความร้อนสูงเกินไป, overcurrent แผงป้องกัน, overvoltage แผงป้องกัน, losting เฟสป้องกัน (อุปกรณ์เสริม), การสื่อสารข้อผิดพลาด, PID ข้อเสนอแนะสัญญาณผิดปกติ, PG failure และสั้นวงจร ground protection. |
|
IGBT จอแสดงผลอุณหภูมิ |
แสดงอุณหภูมิปัจจุบัน IGBT |
||
ทันที - ลงรีสตาร์ท |
น้อยกว่า 15 มิลลิวินาที: ต่อเนื่อง. มากกว่า 15 มิลลิวินาที: การตรวจจับมอเตอร์ความเร็วทันที - ลงรีสตาร์ท. |
||
เริ่มต้นความเร็ว tracking method |
อินเวอร์เตอร์โดยอัตโนมัติแทร็คมอเตอร์ความเร็วหลังจากเริ่มต้น |
||
พารามิเตอร์ฟังก์ชันป้องกัน |
ปกป้องอินเวอร์เตอร์พารามิเตอร์โดยการตั้งค่ารหัสผ่านผู้ดูแลระบบและถอดรหัส |
||
จอแสดงผล |
LED/OLED แป้นพิมพ์ |
วิ่งข้อมูล |
การตรวจสอบวัตถุรวมถึง: วิ่งความถี่, ชุดความถี่, รถบัสแรงดันไฟฟ้า, แรงดันไฟฟ้า, กระแสไฟขาออก, กำลังขับเอาท์พุทแรงบิด, อินพุตเทอร์มินัล, เอาต์พุตเทอร์มินัล, analog AI1 มูลค่า, analog AI2 มูลค่า, มอเตอร์จริงทำงาน,PID ชุดมูลค่าเปอร์เซ็นต์, PID ข้อเสนอแนะมูลค่าเปอร์เซ็นต์. |
ข้อผิดพลาดข้อความ |
ส่วนใหญ่ save สามข้อผิดพลาดและ time, ประเภท, แรงดันไฟฟ้า, current, ความถี่และสถานะการทำงานสามารถสอบถามเมื่อ failure คือเกิดขึ้น |
||
จอแสดงผล LED |
จอแสดงผลพารามิเตอร์ |
||
จอแสดงผล OLED |
อุปกรณ์เสริม, prompts การทำงานเนื้อหาจีน/ภาษาอังกฤษข้อความ |
||
สำเนาพารามิเตอร์ |
สามารถอัพโหลดและดาวน์โหลดฟังก์ชั่นรหัสข้อมูลแปลงความถี่ rapid replication พารามิเตอร์ |
||
กุญแจล็อคและเลือกฟังก์ชั่น |
ล็อค part หรือคีย์, กำหนดฟังก์ชั่นขอบเขตบางปุ่มป้องกัน misuse. |
||
การสื่อสาร |
RS485 |
อุปกรณ์เสริมสมบูรณ์แยก RS485 โมดูลการสื่อสารสามารถสื่อสารกับโฮสต์คอมพิวเตอร์ |
|
สภาพแวดล้อม |
สภาพแวดล้อมอุณหภูมิ |
- 10°C40°C |
|
เก็บอุณหภูมิ |
- 20°C65°C |
||
สภาพแวดล้อมความชื้น |
น้อยกว่า 90% R.H, ไม่มีการควบแน่น |
||
การสั่นสะเทือน |
ด้านล่าง 5.9 เมตร/s² (= 0.6 กรัม) |
||
การใช้งานเว็บไซต์ |
ในร่มที่ไม่มีแสงแดดหรือกัดกร่อน, ระเบิดแก๊สและไอน้ำ, ฝุ่น, แก๊สไวไฟ, oil mist, ไอน้ำ, หยดหรือเกลือ, ฯลฯ. |
||
ความสูง |
ด้านล่าง 1000 เมตร |
||
ProdUctมาตรฐาน |
ผลิตภัณฑ์ใช้มาตรฐานความปลอดภัย |
IEC61800-5-1: 2007 |
|
ผลิตภัณฑ์ใช้ EMC มาตรฐาน |
IEC61800-3: 2005 |
||

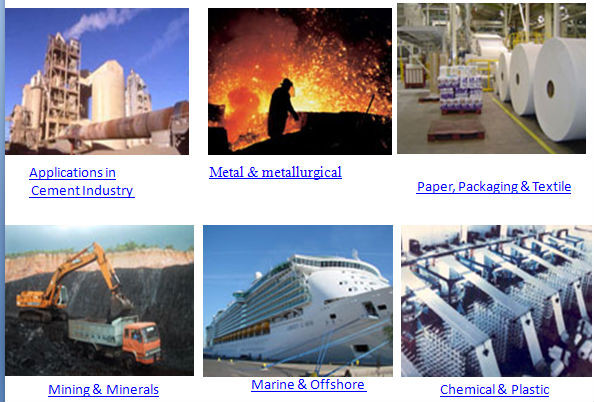
การประยุกต์ใช้รายละเอียด
1. ใช้งานร่วมกับมอเตอร์สามารถใช้กันอย่างแพร่หลายสำหรับขับรถ asynchronous มอเตอร์แม่เหล็กถาวรมอเตอร์
2. การควบคุมที่ยอดเยี่ยมประสิทธิภาพเซนเซอร์ควบคุมเวกเตอร์โหมด
3.แรงบิดขนาดใหญ่ที่ความเร็ว stable ภายใต้ควบคุมเวกเตอร์
4. Fast current จำกัดฟังก์ชั่น make จริงๆ tripless การทำงาน
5. Rich I/O terminal.
6. การปรับตัวที่แข็งแกร่ง







การเยี่ยมชมลูกค้า


ทุกการชำระเงินที่คุณทำบน Chovm.com มีความปลอดภัยด้วยการเข้ารหัส SSL และโปรโตคอลการป้องกันข้อมูล PCI DSS ที่เข้มงวด

ขอรับเงินคืนหากคำสั่งซื้อของคุณไม่ได้จัดส่ง สูญหาย หรือสินค้าที่มาถึงมีปัญหาที่ตัวผลิตภัณฑ์
